等价输入干扰:LMI镇稳
等价输入干扰:LMI镇稳
Bohao Zhao等价输入干扰:LMI镇稳
得有一点EID基础,不懂的或者我没写到的看上面论文去~
前言
假设需要考虑建模的不确定性,不确定性的存在使得分离定理不再适用。因此,状态观测器和状态反馈控制器不能独立设计。为了解决这个问题,我们需要建立一个新的框架,同时设计状态观测器和状态反馈控制器的增益,即学习用利用线性矩阵不等式提出稳定性条件和控制器设计方法。
准备工作
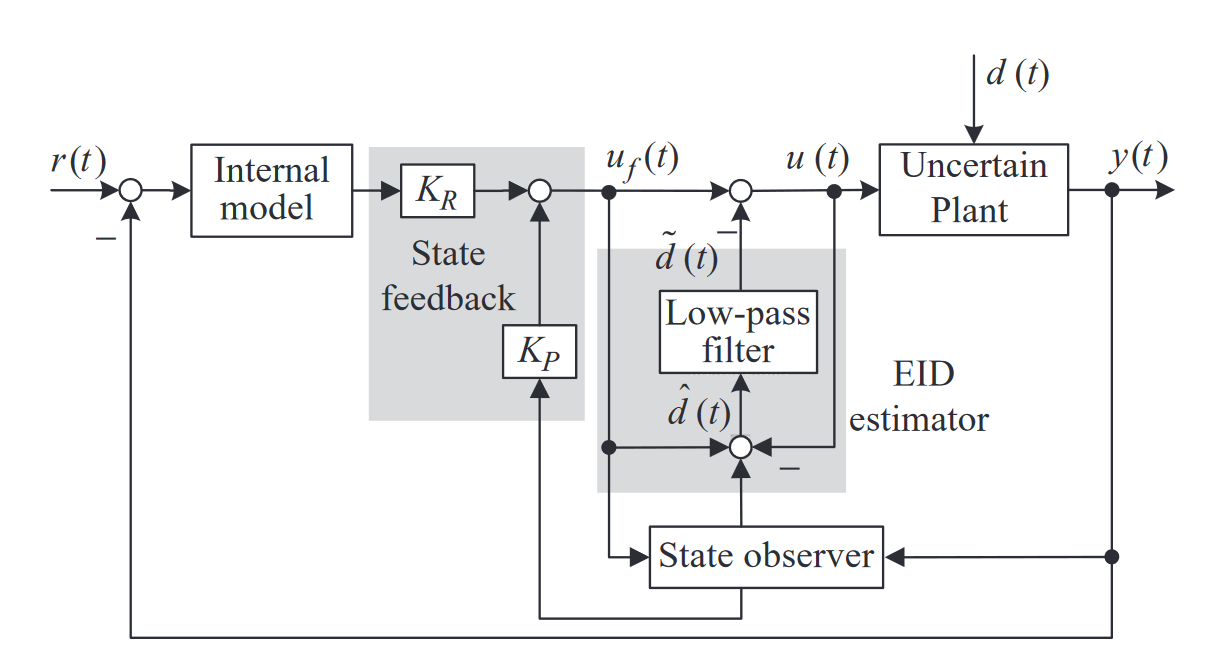
不确定控制对象(Uncertain Plant):
其中不确定项满足:
令观测误差为
LMI镇定和控制器参数设计
引理
引理1(Schur补):对于给定的对称矩阵:
, 且 , 且 .
引理2:对于
引理3:设
定理1:对于给定的参数
LMI式:
此外,状态反馈控制器和观测器的增益分别为:
定理1证明
- 选择lyapunov函数为:
其中
- 对(9)式求导:
根据式(6)可以将式(7)化为下式 (8),
- 式(11)还是双线性矩阵,需要将其转化成大的矩阵形式,因此构造如下:
为什么构造这个函数呢?因为需要将Lyapunov函数内的非线性项一起结合成为一个大矩阵,就是图中的
其中
继续由于
- 令
则有
式(15)其实是为了初步消除矩阵中的非线性项,例如
左右两边同时有变量,为非线性项,左右乘 后的式子为 ,后两项可以看成一个LMI变量,这样就可以消去非线性项。
- 显而易见
为正定矩阵,不改变原有矩阵的正定性,因此带入进去得到:
其中
- 假设C能被奇异值分解为:
其中S为半正定阵,U和V为酉阵(即满足
接着,令
- 由式(3)得到:
再由 引理3 得到系统的稳定。
参考文献
[1] R.-J. Liu, G.-P. Liu, M. Wu, F.-C. Xiao, and J. She, “Robust disturbance rejection based on equivalent-input-disturbance approach,” IET Control Theory & Applications, vol. 7, no. 9, pp. 1261–1268, 2013, doi: 10.1049/iet-cta.2013.0054.