控制方法 等价输入干扰 等价输入干扰:Matlab求解LMI Bohao Zhao 2025-04-25 2025-04-25 等价输入干扰EID:Matlab求解LMI
镇稳目标
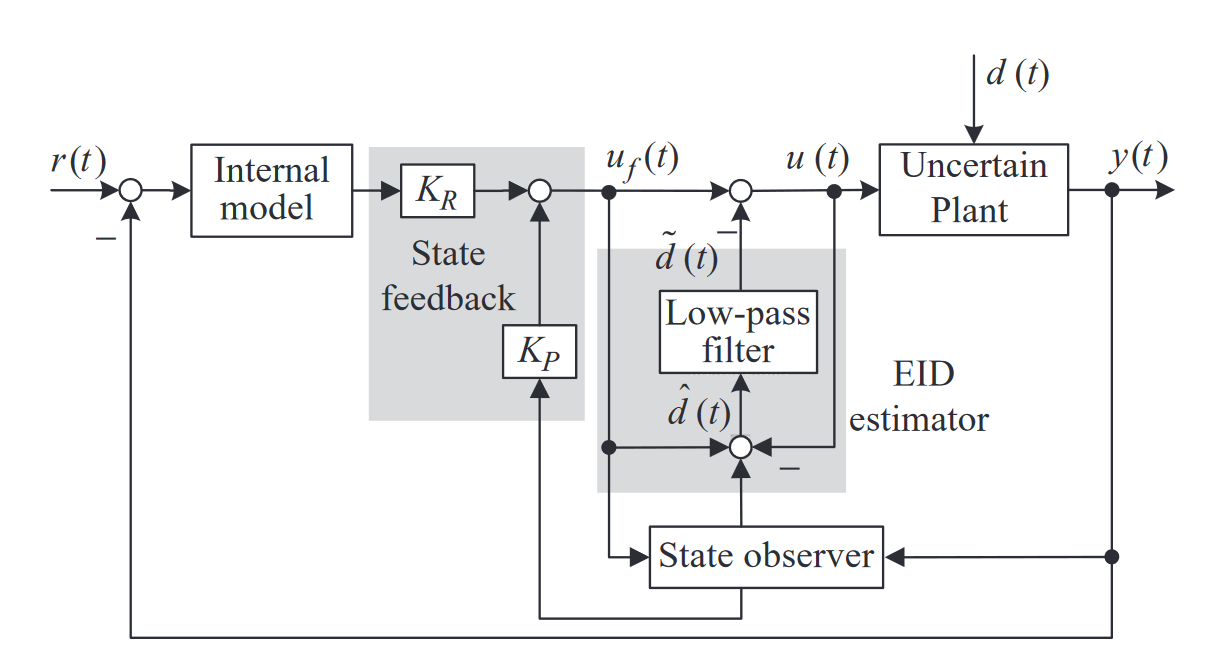
使EID系统镇稳的LMI推导详细请见上篇。
本篇论文中,使整个系统稳定的LMI条件为:
待定LMI变量为
(1)式和(2)式内各参数为:
求解后可得参数:
基于 Yalmip 的
Matlab 程序编写
初始化准备
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 clear; clc; A = [-2 3 ; 4 -5 ]; B = [1 ;1 ]; C = [2 1 ]; Bd = [2 ;1 ]; M = [-1 ;0 ]; AF = -101 ; BF = 100 ; CF = 1 ; BZ = pinv(B); [U,S,V] = svd(C); V1 = V(:,1 ); V2 = V(:,2 ); S = S(1 ); w = 0.5 ; a=1 ; b=1 ; alfa_1 = 1 ; alfa_2 = 1 ;
定义sdpvar变量
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 X1 = sdpvar(2 ); X11 = sdpvar(1 ); X22 = sdpvar(1 ); X3 = sdpvar(1 ); X4 = sdpvar(1 ); X2=V1*X11*V1'+V2*X22*V2'; W1 = sdpvar(1 ,2 ); W2 = sdpvar(2 ,1 ); W3 = sdpvar(1 );
构建LMI不等式
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 pusai_11 = (A*X1+alfa_1*X1)+(A*X1+alfa_2*X1)'+B*W1+(B*W1)'; pusai_12 = W2*C+B*M'*X2; pusai_13 = W2*C*M+B*X3; pusai_14 = 0 *ones (size (pusai_13)); pusai_22 = (A*X2+alfa_2*X2)+(A*X2+alfa_2*X2)'-W2*C-(W2*C)'-B*M'*X2-(B*M'*X2)'; pusai_23 = -B*X3+C'*W3'+A*X2*M+alfa_2*X2*M-W2*C*M; pusai_24 = -B*CF*X4+(BF*BZ*W2*C)'+X2*M*BF; pusai_33 = W3*C*M+(W3*C*M)'; pusai_34 = X3*BF'+(BF*BZ*W2*C*M)'; pusai_44 = (AF+BF*CF)*X4+((AF+BF*CF)*X4)'; eq1 = [pusai_11 pusai_12 pusai_13 pusai_14; pusai_12' pusai_22 pusai_23 pusai_24; pusai_13' pusai_23' pusai_33 pusai_34; pusai_14' pusai_24' pusai_34' pusai_44; ]; Z_22 = zeros (size (X1)); Z_21 = [0 ;0 ]; eq2 = [X1 Z_22 Z_21 Z_21; Z_22' X2 X2*M Z_21; Z_21' (X2*M)' X3 0 ; Z_21' Z_21' 0 X4; ]
注意上式的全零阵的维度,也就是观察整个矩阵保持方阵的维度正确
LMI约束编程
1 2 3 4 5 6 7 8 F = [X1 >= 0 ]; F = F + [X11 >= 0 ]; F = F + [X22 >= 0 ]; F = F + [X3 >= 0 ]; F = F + [X4 >= 0 ]; F = F + [eq1 <= 0 ]; F = F + [eq2 >= 0 ];
求解LMI
1 2 3 4 5 6 7 8 9 sol = optimize(F); if sol.problem == 0 disp ("求解成功" ); elseif sol.problem == 1 disp ( "求解失败,无可行解" ); else disp ( "求解失败,其他错误" ); end
提取解
1 2 3 4 5 6 7 8 9 X1 = value(X1); X11 = value(X11); X22 = value(X22); X3 = value(X3); X4 = value(X4); W1 = value(W1); W2 = value(W2); W3 = value(W3);
这里我都提取了,其实只需要些许解就ok了,不过无伤大雅
7.计算反馈控制器
1 2 3 4 5 6 L1 = W2*U*S*inv(X11)*inv(S)*U' L2 = W3*U*S*inv(X11)*inv(S)*U' L3 = BZ*L1 Kp = W1*inv(X1) B1=BZ;
C.仿真实战
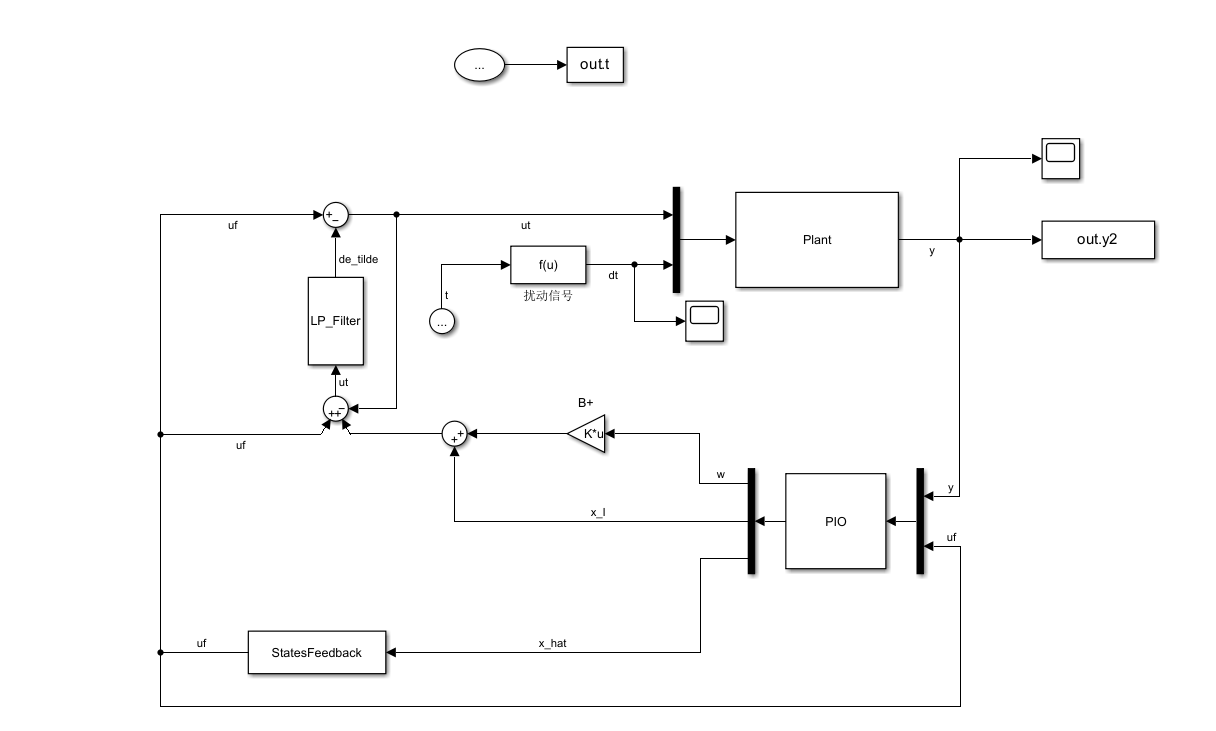
仿真模型(s-function搭建)
干扰信号图
论文中LMI解得参数抑制后的输出效果
本文yalmip工具解得参数抑制输出效果
结论:用另外一种LMI工具一样可以解出可行参数使系统达到镇定效果
参考文献
[1] M. Wu, F. Gao, P. Yu, J. She, and W. Cao, “Improve
Disturbance-Rejection Performance for an
Equivalent-Input-Disturbance-Based Control System by Incorporating a
Proportional-Integral Observer,” IEEE TRANSACTIONS ON INDUSTRIAL
ELECTRONICS , vol. 67, no. 2, 2020, doi: 10.1109/TIE.2019.2898627 .