PPO算法-chapter9-策略梯度方法
PPO算法-chapter9-策略梯度方法
Bohao Zhao[chapter-9]-策略梯度方法
[PPO算法]-策略梯度-梯度上升和Reinfore
前言
此前,策略一直以表格形式表示:
- 所有状态的动作概率存储在一张表
中,表的每个条目由状态-动作对索引。
现在,策略也可以用带参数的函数表示:
其中
- 该函数可以是神经网络,输入为状态
,输出为执行每个动作的概率,参数为 。 - 优点:当状态空间很大时,表格表示在存储和泛化方面效率低下。
- 函数表示有时也写作
、 或 。
表格表示与函数表示的差异:
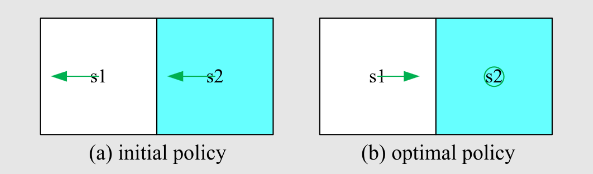
首先,如何定义最优策略?
- 在表格情形中,策略
最优当且仅当它能最大化每个状态的价值。 - 在函数情形中,策略
最优当且仅当它能最大化某个标量指标。
其次,如何获取某个动作的概率?
- 在表格情形中,可直接查表获得在状态
下采取动作 的概率。 - 在函数情形中,需根据函数结构与参数
计算 的值。
策略梯度的基本思想很简单:
第一,定义最优策略的指标(或目标函数):
用它来衡量策略的优劣。
第二,用基于梯度的优化算法搜索最优策略:
尽管思想简单,当我们试图回答以下问题时,复杂性便出现了:
- 应该使用哪些合适的指标?
- 如何计算这些指标的梯度?
本节课将详细解答这些问题。
目标函数的指标
第一个指标是平均状态价值,简称平均价值:
是状态价值的加权平均。 是状态 的权重。
由于,我们可以将 理解为一种概率分布,因此该指标也可写作:
如何选择分布
情况 1:
这种情况相对简单,因为指标的梯度更容易计算:
此时,我们将
特别记为 , 记为 。
如何选择
一种简单方法是所有状态同等重要,即:
另一种重要情况是只关心某个特定状态
。
例如,某些任务的所有回合都从同一状态开始,那么我们只关心从 出发的长期回报。此时: 在这种情况下,
。
情况 2:
- 常见做法是将
选为 ,即在策略 下的平稳分布。
平稳分布的细节见上一节课及教材。
选择
反映了在给定策略 下,马尔可夫决策过程的长期行为。 - 如果某个状态在长期中被频繁访问,则它更重要,应赋予更大权重;
- 如果某个状态几乎不被访问,则赋予较小权重。
一个重要的等价表达式:
你将在文献中经常见到如下指标:
问题:它与我们刚才介绍的指标有什么关系?
回答:它们是同一个指标。原因在于:
第二个指标是平均一步奖励,简称平均奖励:
其中
备注:
是即时奖励的加权平均。 是从状态 获得的平均即时奖励。 是平稳分布。
一个重要的等价表达式:
- 假设智能体遵循给定策略并生成一个轨迹,其奖励为
。 - 该轨迹上的平均一步奖励为
其中
一个重要的事实是:
备注:
- 强调:起始状态
不重要。
| 指标 | 表达式 1 | 表达式 2 | 表达式 3 |
|---|---|---|---|
表:对
关于指标的备注 1:
- 所有这些指标都是
的函数。 - 由于
由 参数化,这些指标也是 的函数。 - 换句话说,不同的
值可以产生不同的指标值。
因此,我们可以寻找最优的
这是策略梯度方法的基本思想。
关于指标的备注 2:
- 一个复杂之处在于,这些指标可以在折扣情况(
)或非折扣情况( )下定义。
关于指标的备注 3:
和 之间有什么关系? 这两个指标是等价(但不相等)的。具体来说,在折扣因子
的折扣情况下,有:
因此,它们可以同时最大化。
目标函数梯度计算
给定一个指标,我们接下来
- 推导其梯度
- 然后应用基于梯度的方法优化该指标
梯度计算是策略梯度方法中最复杂的部分之一!原因在于
- 首先,我们需要区分不同指标:
、 等 - 其次,我们需要区分折扣与非折扣情况
直接给出梯度表达式(无证明):
上式是多种情形的统一表达式:
可以是 、 或其他指标 - “=” 可能表示严格相等、近似或成比例
是状态的分布或权重
该表达式的推导非常复杂,此处不展开。感兴趣的读者可参考我的教材。
对大多数读者而言,记住此表达式即可。
梯度的紧凑且重要表达式:
首先,为何此表达式有用?
- 因为我们可用样本近似梯度:
其中
第二,如何证明上述等式?
证明:考虑自然对数函数
从而
于是有
备注:
为使
这可通过 softmax 实现,它能将任意实数向量归一化为分量在
且和为 1 的概率分布。
例如,对向量, 具体地,策略函数取形式
其中
为待学习的函数。
备注:
- 这种基于 softmax 的形式可由一个神经网络实现,其输入为状态
,参数为 。网络输出维度为 ,每个输出对应一个动作 的策略概率 ,输出层激活函数需使用 softmax。 - 由于对所有
均有 ,该参数化策略是随机的,因而具有探索性。 - 也存在确定性策略梯度(DPG) 方法
基于梯度的算法和Reinfore
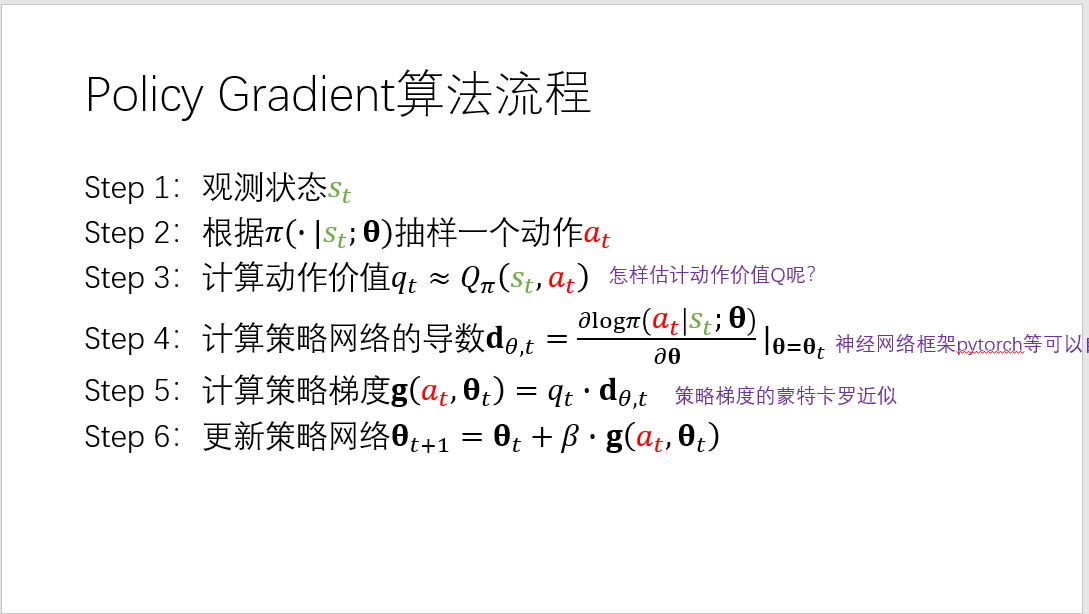
现在,我们给出第一个策略梯度算法来寻找最优策略!
- 最大化
的梯度上升算法:
- 由于真实梯度未知,可用随机梯度代替:
- 进一步,
也未知,可用其估计 替代:
若用 蒙特卡洛估计 来计算
REINFORCE
- REINFORCE 是最早且最简单的策略梯度算法之一。
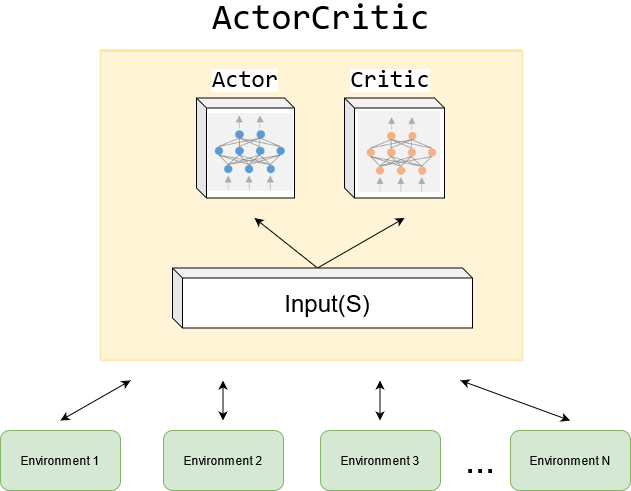
- 许多其他策略梯度算法(如下一讲将介绍的 Actor-Critic 方法)都可看作是对 REINFORCE 的扩展。
伪代码:蒙特卡洛策略梯度(REINFORCE)
初始化:初始参数
; ; 。
目标:学习最优策略以最大化。 对每个回合,执行:
依照
生成一个回合
对于
:
- 价值更新:
- 策略更新:
备注 1:如何进行采样?
- 如何采样状态
?
,其中 是在策略 下的长期行为分布。
实践中,人们通常不关心这一点。 - 如何采样动作
?
。因此, 应按照 在 处采样。
因此,策略梯度方法是 on-policy 的。
备注 2:如何解释该算法?
由于
算法可重写为
因此,算法的重要表达式为
解释(续):
与 成正比
更大的更大的 更大的
因此算法倾向于利用价值更高的动作。与 成反比(当 时)
更小的更大的 更大的
因此算法倾向于探索概率较低的动作。
伪代码:蒙特卡洛策略梯度(REINFORCE)
初始化:
参数化策略,折扣因子 ,学习率 。 目标:寻找最优策略以最大化
。 第
次迭代,执行:
选取初始状态
,依照 生成一条轨迹:
。 对于
,执行
策略更新:
其中
。 令
。