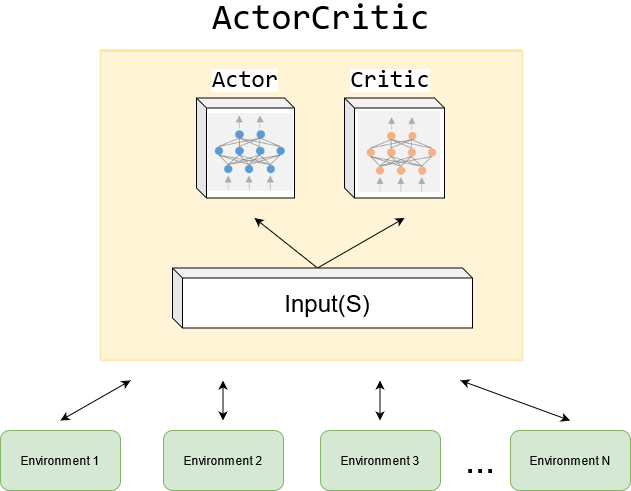
PPO算法-chapter2-贝尔曼方程
PPO算法-chapter2-贝尔曼方程
Bohao Zhao[chapter-2]-贝尔曼方程
[PPO 算法]-贝尔曼方程
前言
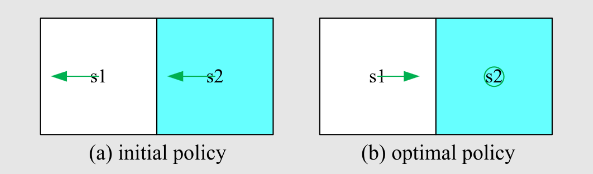
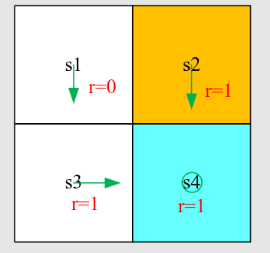
return 是非常重要的,可以去评估策略,是建立起数学和直观感觉的纽带,先看例子:
哪一个策略最好,哪个策略最差?
可以用数学去表达,即用计算 return 来评估 return(注意一般所说的 return 指的是 discounted return,涉及到无穷级数求和数学知识)
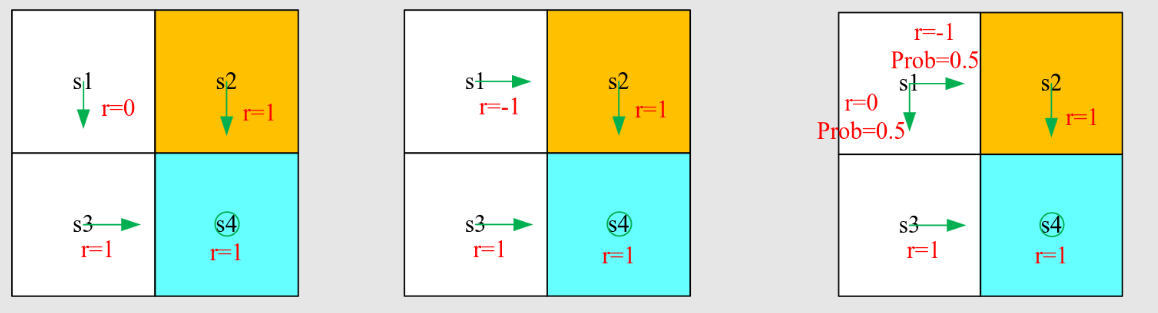
注意这里只计算第三个轨迹的 return 为例,因为其是随机的:
如何去计算reward?对于下面的轨迹来说:
方法1:设
方法2(Bootstrapping):
这种方法叫做自举,从自己出发得到自己,类似于递归
用矩阵来表示为:
可以简写为:
这就是确定性策略的贝尔曼公式,可以用线性代数求解此线性方程组
State Value
考虑以下单步过程:
:离散时间实例 :时间 的状态 :在状态 采取的动作 :采取 后获得的奖励 :采取 后转换到的状态
注意
这一步由以下概率分布控制:
由 得到 由 得到 由 得到
目前,我们假设我们知道模型(即概率分布)
考虑以下多步轨迹:
折扣回报为
是折扣率。 也是一个随机变量,因为 是随机变量。
定义
注:
- 它是
的函数。它是在状态从 开始的条件下的条件期望。 - 它基于策略
。对于不同的策略,状态值可能不同。
return和state-value之间的关系是什么?
state-value是从状态开始可以获得的所有可能回报的平均值。如果所有
现在再看前言的三个策略,计算他们的state-value:
可知策略
贝尔曼公式
描述了所有状态值之间的关系
简单来说,贝尔曼公式描述了所有state-value直接的关系
考虑一个随机轨迹:
回报
然后,根据状态值的定义,有
接下来,分别计算这两个项。
首先,计算第一项
这是瞬时奖励的期望
接着,计算第二项
这是未来奖励的均值
由于无记忆的马尔可夫性质。
因此,我们有
此方程中的符号
和 是要计算的状态值。自举法! 是给定的策略。解这个方程称为策略评估。 和 表示动态模型。如果模型是已知或未知的呢?
注意:
上述方程称为贝尔曼方程,它描述了不同状态的状态值函数之间的关系。
它由两项组成:即时奖励项和未来奖励项。
一组方程:每个状态都有一个这样的方程!
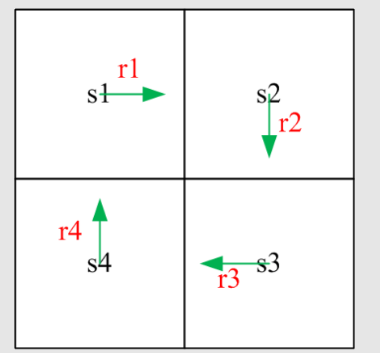
如何理解贝尔曼方程?考虑例子:
根据一般表达式写出贝尔曼方程:
这个例子很简单,因为策略是确定性的
首先,考虑状态值
且 。 且 。 且 。
将它们代入贝尔曼方程得到
同样,可以得到
解上述方程,从最后一个到第一个:
如果
计算完状态值后我们该怎么办?要有耐心(计算动作值并改进策略)
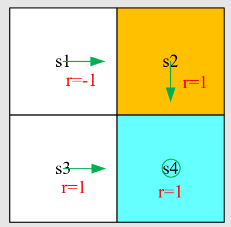
例2:
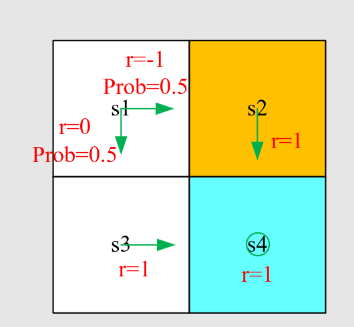
答案:
$$ v_{\pi}(s_1) = 0.5[0 + \gamma v_{\pi}(s_3)] + 0.5[-1 + \gamma v_{\pi}(s_2)]\
v_{\pi}(s_2) = 1 + \gamma v_{\pi}(s_4)\
v_{\pi}(s_3) = 1 + \gamma v_{\pi}(s_4)\
v_{\pi}(s_4) = 1 + \gamma v_{\pi}(s_4)\ $$
解上述方程,从最后一个到第一个。
将
与之前的策略比较。这个更差。
贝尔曼公式矩阵和向量形式
为什么考虑矩阵-向量形式?因为我们需要从中求解state-value
一个未知数依赖于另一个未知数。如何解决这些未知数?
元素形式:上述元素形式对每个状态
矩阵-向量形式:如果我们把所有方程放在一起,我们有一组线性方程,可以简洁地写成矩阵-向量形式。矩阵-向量形式非常优雅且重要。
回顾:
将贝尔曼方程重写为
其中
假设状态可以被索引为
将所有状态的这些方程放在一起并重写为矩阵-向量形式
其中
,其中 ,是状态转移矩阵
如果有四个状态,
$$
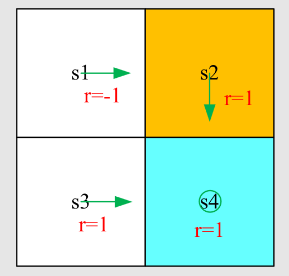
例1:
.zip.af3/[强化学习]-PPO算法/assets/image-20250904105507-q55svo3.png)
其贝尔曼方程可以表示为
$$
例2:
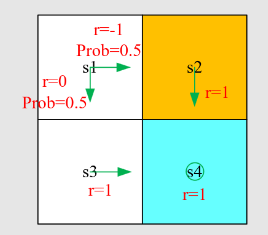
其贝尔曼方程可以表示为
$$
为什么要解state-value?
- 给定一个策略,找出对应的状态值称为策略评估(Policy Evaluation)
- 这是强化学习(RL)中的一个基本问题。它是找到更好策略的基础。
- 因此,理解如何解贝尔曼方程是很重要的。
贝尔曼方程的矩阵-向量形式是
(1)闭式解是:
- 矩阵
是可逆的。 - 我们仍然需要使用数值算法来计算矩阵的逆。
- 可以避免矩阵求逆操作吗?可以
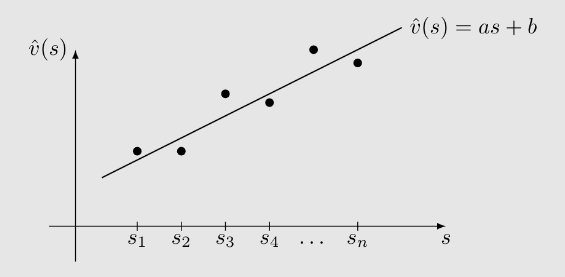
(2)一种迭代解是:
该算法导致一个序列
证明过程略
Action Value
从state value到action value:
- state value:智能体从某个状态开始可以得到的平均回报。
- action value:智能体从某个状态开始并采取某个动作可以得到的平均回报。
为什么我们关心动作值?因为我们想知道哪个动作更好。
定义:
是状态-动作对 的函数 依赖于
根据条件期望的性质,可以得出(类似全概率公式)
因此,
此外,回忆一下状态值由以下公式给出
我们得到动作值函数为
状态值公式揭示了如何从动作值得到状态值,动作值函数揭示了如何从状态值得到动作值
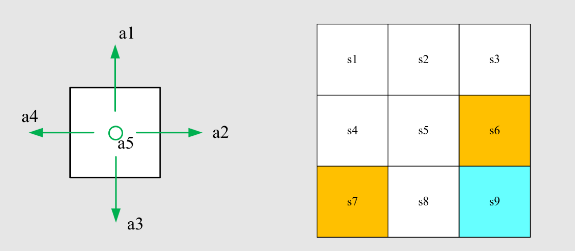
例:
写出状态
问题:
不一定为0!