ROS 实现深蓝学院宇树机器人仿真
ROS 实现深蓝学院宇树机器人仿真
Bohao ZhaoROS 实现深蓝学院宇树机器人仿真
环境必备
深蓝学院的作业是使用
ROS一件安装指令,在终端进行操作
- 使用鱼香 ROS 一键安装指令
此时安装后的版本为 ROS-Noetic
- 更新系统,在终端执行指令
- 按照深蓝指南安装与 ROS 相关的依赖库
2
3
4
5
6
7
8
9
10
11
12
13
cmake \
curl \
git \
libfreeimage-dev \
libprotoc-dev \
protobuf-compiler \
libignition-math6-dev \
libsqlite3-dev \
libtinyxml2-dev \
libgflags-dev \
libavformat-dev \
libavcodec-dev
- 添加
Gazebo官方软件源,为安装其做准备
2
3
$ wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
- 安装 Gazebo,首先更新软件再进行安装
2
$ sudo apt install -y gazebo11 libgazebo11-dev
- 配置 Gazebo 的环境变量,告诉系统此文件的路径
2
$ source ~/.bashrc
- 验证其安装结果,初始化软件
这时候由于环境变量配置了,就每次添加环境变量
- 安装 Eigen 数值计算库,为 Cpp 的数值计算作准备
2
3
4
5
$ mkdir build
$ cd build
$ cmake ..
$ sudo make install
- 安装 RealSense SDK,用于摄像头等外设与 ROS 进行通讯
- 安装 Ignition-math ,作为 Gazebo 的数字计算库
编译和运行
找到项目工作空间的根目录,通常根目录下包含文件
.catkin_workspace,用于标识工作空间,但是往往不会直接显示,按住组合键ctrl+H显示隐藏文件
- 在此处打开终端,使用 ROS 专属的构建命令
2
$ catkin_make
- 启动 ROS 工作节点,先启动 Gazebo 仿真节点
深蓝给出的启动方式为
2
$ roslaunch unitree_guide gazebo.launch第一个命令是临时地将此环境变量告诉给系统,每次输入这个有点麻烦,我们做一个一劳永逸的工作
先找到当前工作空间的
devel/setup.bash的绝对路径
得到终端的响应
再在当前工作空间打开终端,并输入命令
2
$ echo " source ~/RemoteUsers/Bohao/examples/robocup_g1/devel/setup.bash" >> ~/.bashrc # 所有终端均生效这时候就将环境变量加入了所有的终端中,再新起一个终端后,直接输入指令
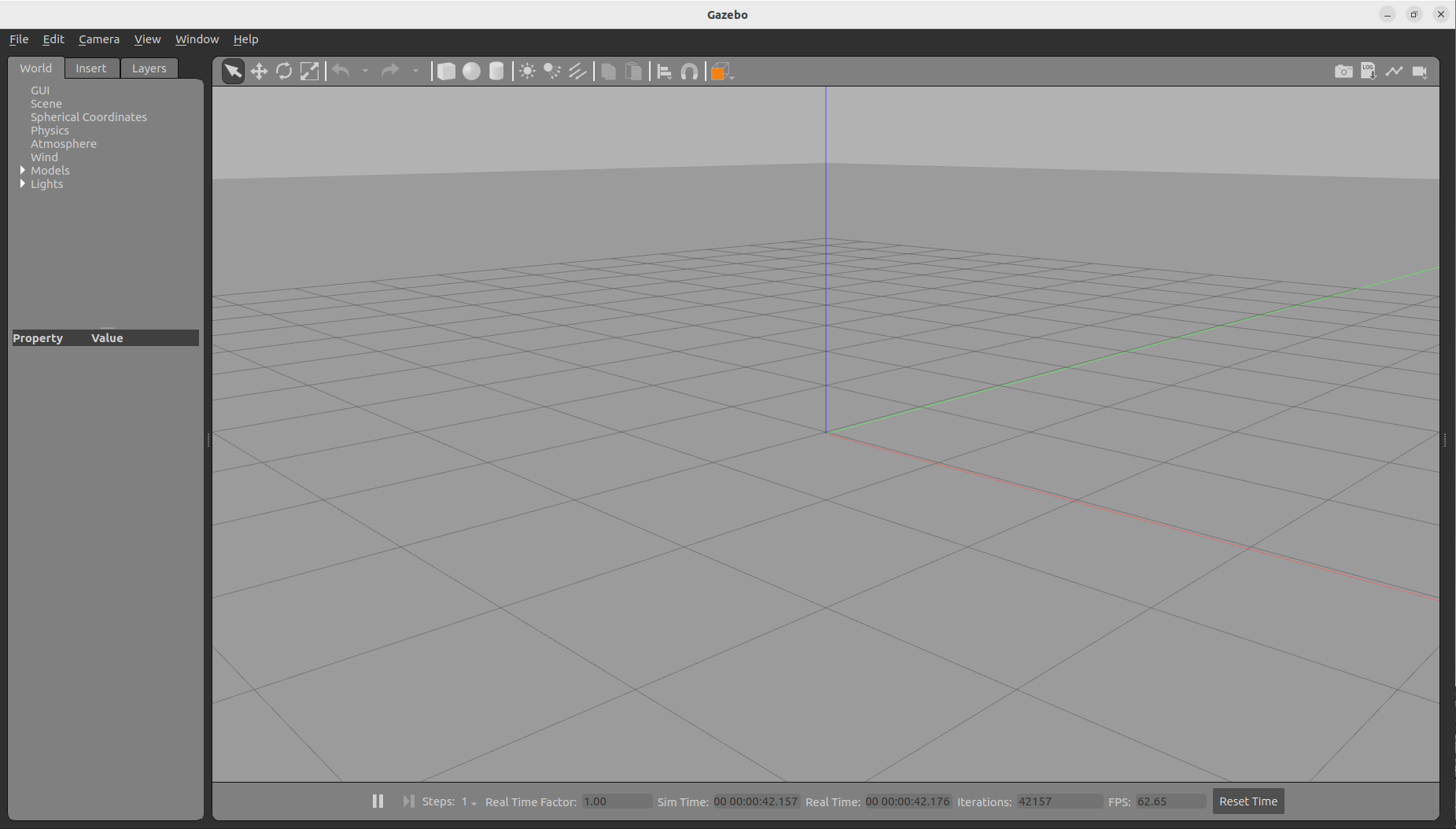
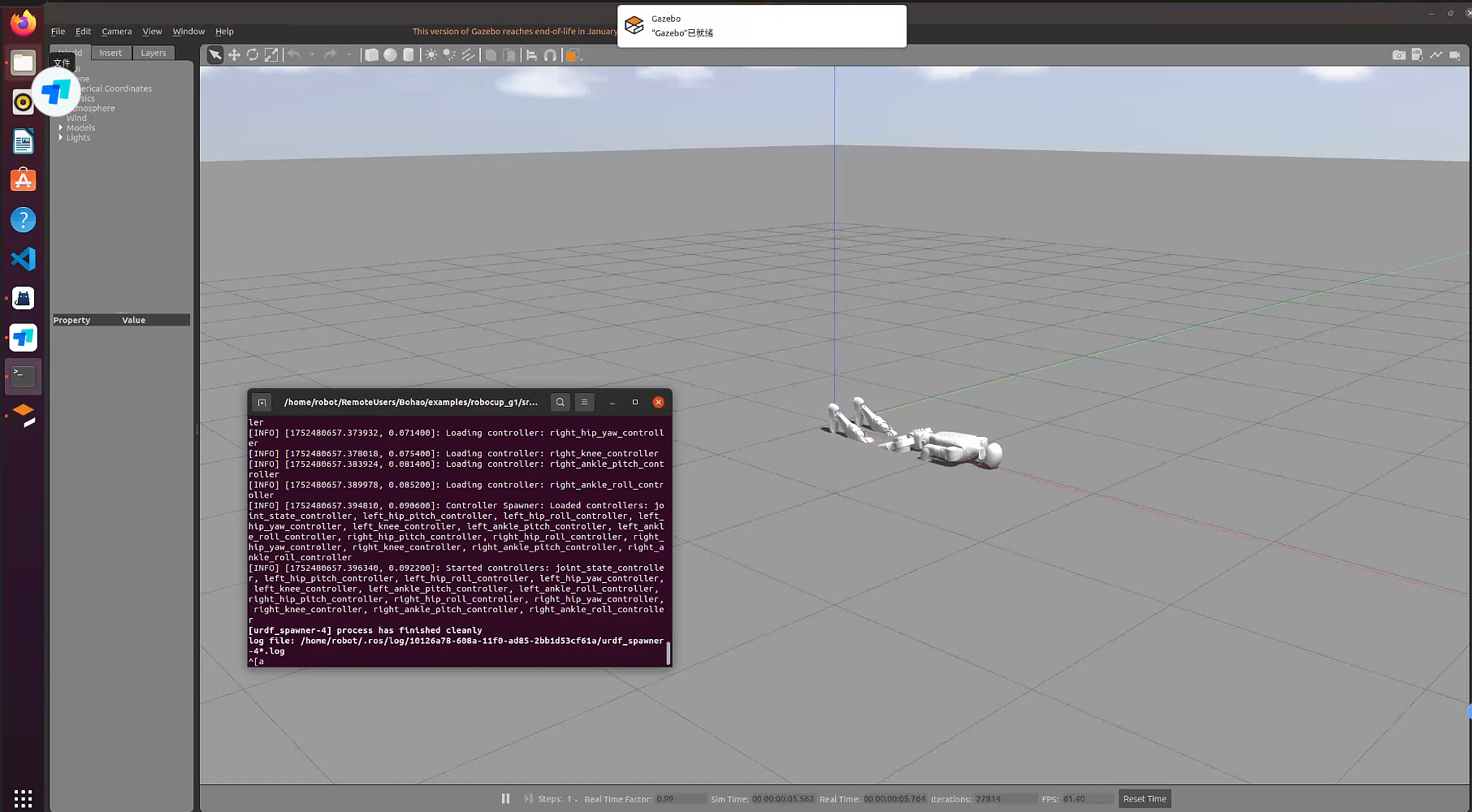
成功启动了 Gazebo 仿真节点
- 在工作空间内新建一个终端
2
$ ./devel/lib/unitree_guide/junior_ctrl此时不用配置环境变量了,因为我们此前将环境变量便携的一次性配置好了,进入键盘控制节点
在
junior_ctrl主界面输入2,控制机器人从 State_Passive 切换到 fixed stand回到 Gazebo 主界面,按下暂停键,然后在主菜单中选择 Edit/Reset Model Poses 以重置机器人的位姿
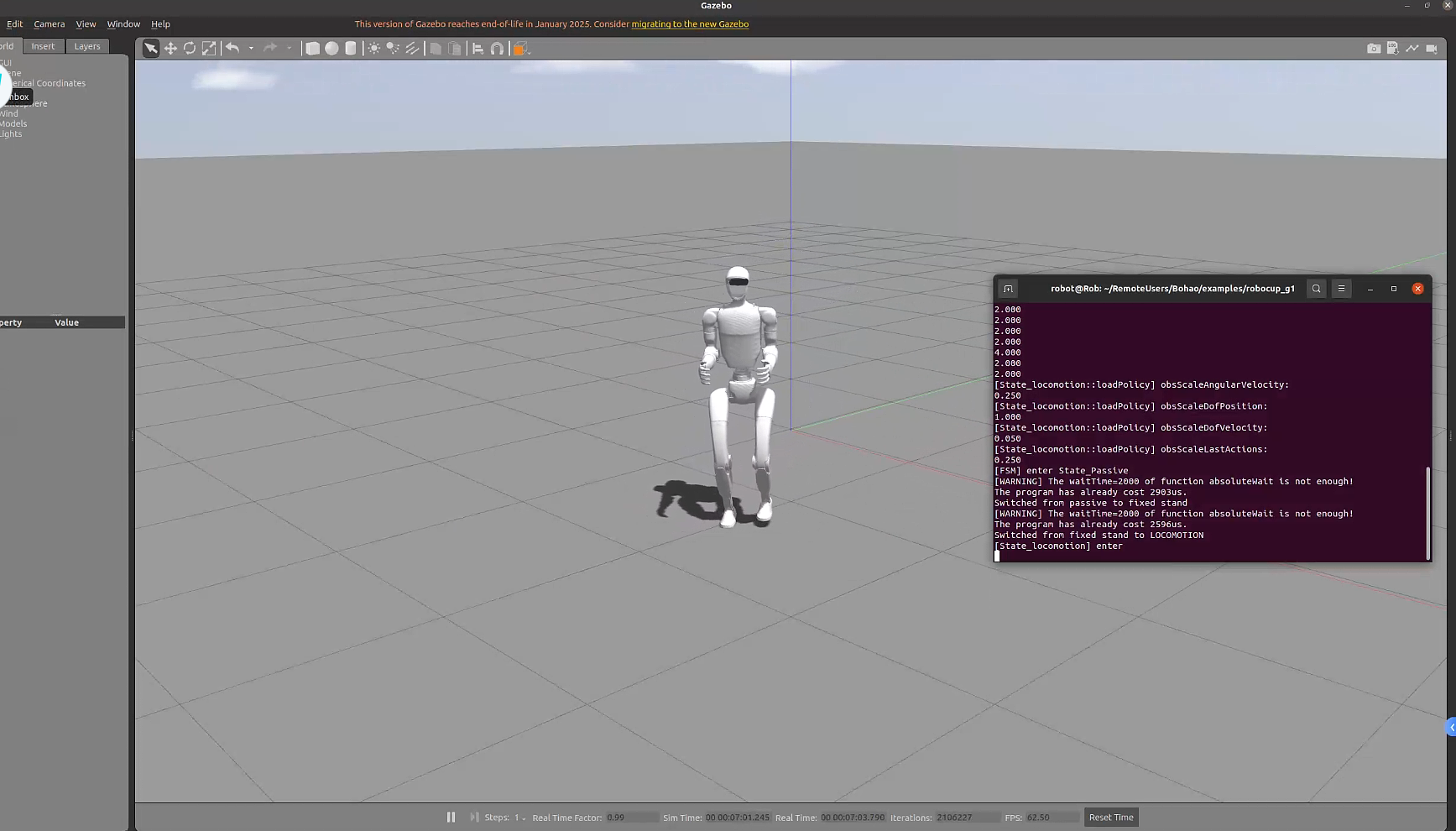
在
junior_ctrl主界面输入4,控制机器人从 fixed stand 切换到 LOCOMOTION回到 Gazebo 主界面,点击播放键,重启应用
运动的键盘控制为
前后运动:
W键:向前运动
S键:向后运动左右平移:
A键:向左平移
D键:向右平移左右旋转:
J键:向左旋转
L键:向右旋转
即可进行机器人的畅玩了
题外,ROS 节点运行情况
- 安装 rqt 小工具,对应适配的 ROS-noetic 版本
- 运行 rqt
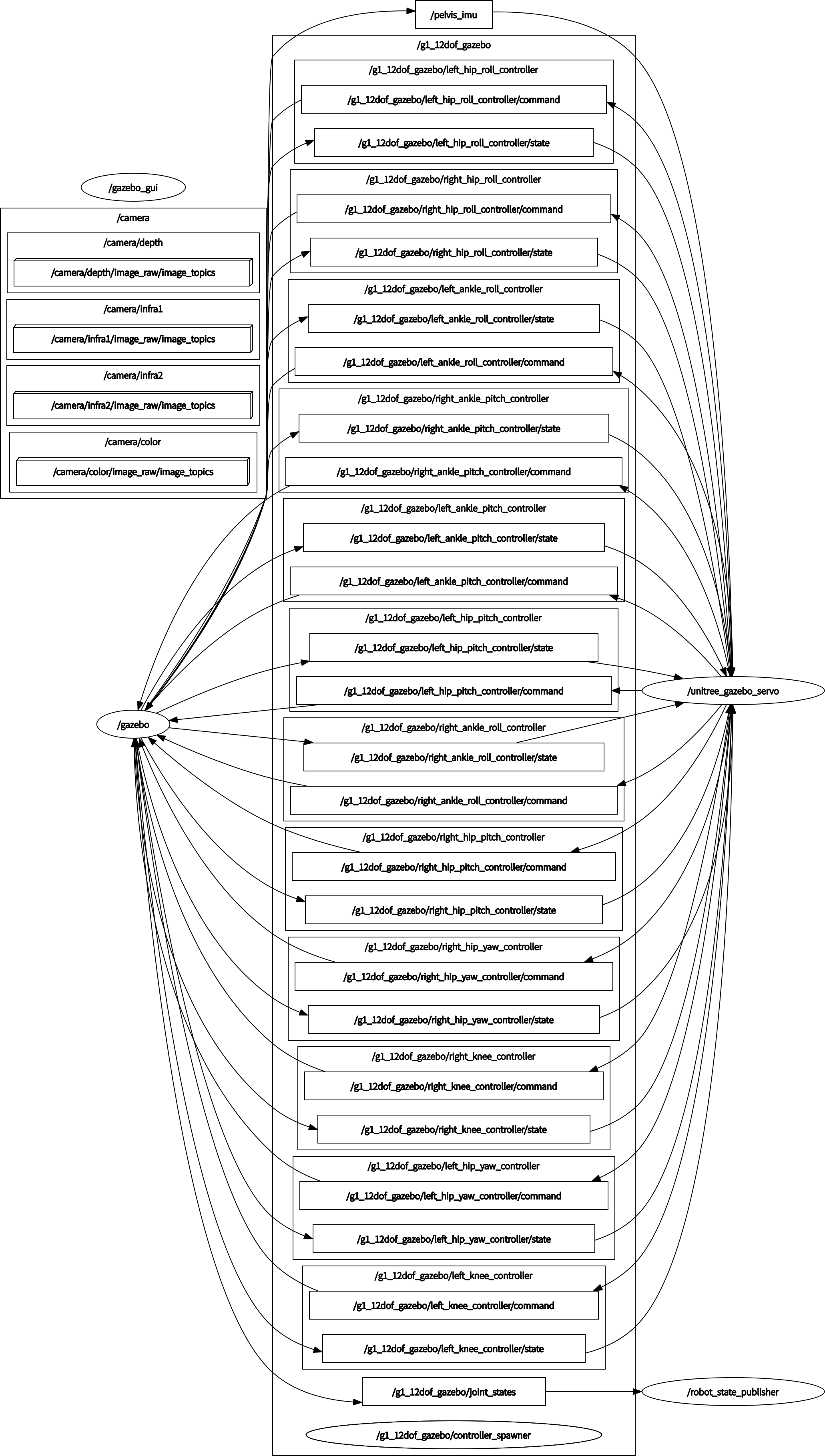
观察到运行中的节点情况为

话题激活情况为
方便后续进行分析和学习




评论
匿名评论隐私政策
✅ 你无需删除空行,直接评论以获取最佳展示效果